21世纪经济报道记者 易思琳
具身智能创业再涌入一家“理想系”公司。
《21汽车·一见Auto》从多位独立信源处独家获悉,理想汽车前AI首席科学家、基座模型负责人陈伟,联手理想汽车前第二产品线负责人张骁,一起创办了新的具身智能公司——斜跃智能,陈伟担任董事长兼CTO、张骁任CEO。公司成立于2026年2月,首轮融资由元璟资本和理想汽车共同投资,近期会完成工商变更。
一位投资人告诉《21汽车·一见Auto》,在赛道选择上,斜跃未来会聚焦家庭场景,做面向C端用户的消费级具身智能产品。据悉,公司成立两个月以来,已经组建了接近20人的团队,且在北京、杭州、深圳三地设立办公地点,正在面向社会招聘核心团队及相关技术人才。
在众多理想离职员工创业的公司里,斜跃智能是理想汽车投资的第二家公司。此前,理想只投资了前总裁沈亚楠创业的公司。
同时,斜跃智能也是元璟资本在一年内孵化的第二个理想系创业团队。此前,元璟资本曾投资由前理想自动驾驶高管贾鹏、王佳佳及前理想CTO王凯联合创立的至简动力,该企业半年内连续完成5轮融资,累计融资金额达20亿人民币,投后估值超10亿美元,迅速成长为具身智能赛道最年轻的独角兽企业。
基座模型是专长
“泛化能力”是当前具身智能领域要突破的核心难题,想要提升具身智能解决问题的能力,训练基座模型必不可少。在当前具身智能的创业中,几乎所有公司都极其重视基座模型的搭建和训练。创始团队是否具备基座模型的架构能力而非单纯的硬件整合能力,也成为当前投资人进行投资选择的重要因素。
一位接近陈伟的知情人士向《21汽车·一见Auto》评价,基座模型能力是斜跃董事长、CTO陈伟的专长。
(陈伟,图源:理想汽车官方)
2021年底,陈伟正式加入理想汽车担任首席科学家,2022年底完成理想智能座舱的全栈自研,并做到了行业领先,此前理想都是采用供应商的方案。2023年,陈伟开始启动理想同学自研大语言模型MindGPT的研发,并于年底上车,这是汽车行业首个在智能座舱落地的多模态认知大模型。
2024年10月,秋季战略会上,李想开始推动面向具身智能的理想自研大模型体系,争夺AI时代的门票,陈伟便是该任务的承接人。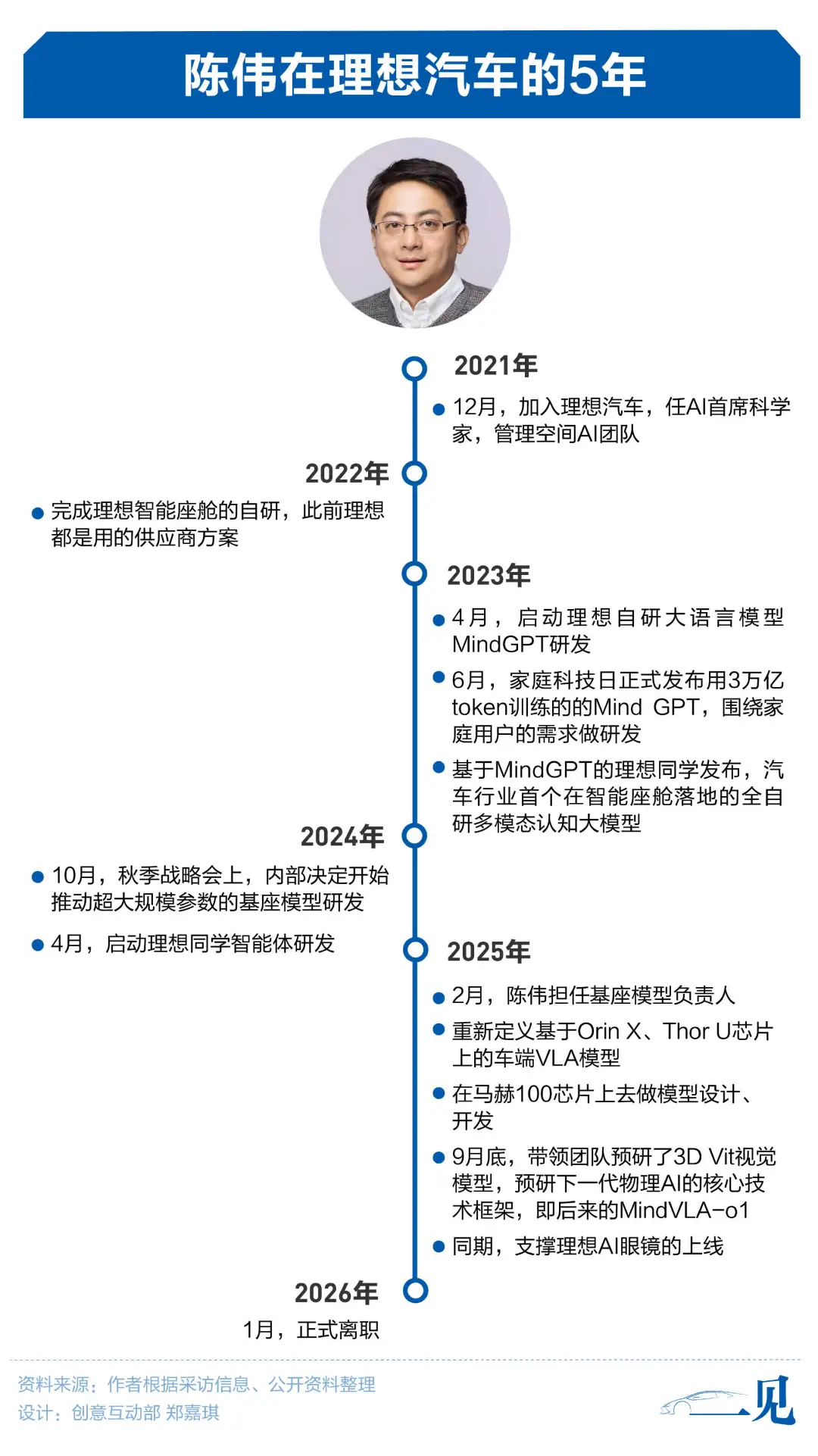
为了进一步优化资源配置,2025年2月,陈伟转任基座模型团队负责人,向CTO谢炎汇报。同期,李想提出明确目标:年内车端必须上线VLA(Vision-Language-Action,视觉语言动作大模型)。
上任后,陈伟的首要任务便是重新定义基于Thor-U和Orin-X芯片上的车端VLA模型。
2024年底,受限于车端芯片算力难以承载大模型参数,理想智能驾驶团队的VLA预研一度基于外部的开源模型,而非自研基座模型。2025年春节过后,李想明确要求,未来理想的VLA一定要用自研基座,于是,基座模型团队和自动驾驶团队随即展开联合开发,重新定义车端VLA模型。双方分工明确:基座模型团队负责芯片上的模型结构设计、预训练;智能驾驶团队围绕VLA的交付去做后训练。
2025年5月,理想正式发布重新定义后的车端VLA模型——MindVLA,理想团队称该模型参数大约为4B(40亿),由云端训练的基座模型蒸馏而来。这个车端模型便是陈伟及其团队的核心研发成果。
做完现有车端芯片的VLA模型研发及交付之后,陈伟在2025年上半年还启动了另一件重要的事情:基于自研芯片马赫100去做模型的设计和开发,以充分发挥芯片的可用算力、提升本地模型的能力。
如何把超大模型塞进算力极其有限的车载芯片里,让芯片资源发挥到最大的效能,陈伟及其团队给出的答案是:在设计模型之初就把硬件的能力考虑进来,实现软硬协同。陈伟及其团队将这一思考形成了论文,并在即将上车L9 Livis的马赫100芯片上进行了首次实践。
(陈伟及其团队的研究成果,Hardware Co-Design Scaling Laws via Roofline Modelling for On-Device LLMs,图源:Google搜索)
2025年下半年,除了做好理想具身基座模型MindVLA在自动驾驶端的布局之外,陈伟还带领团队预研了理想下一代物理AI框架:MindVLA-U1,它是近段时间理想发布的MindVLA-o1自动驾驶基座模型的雏形。
该基座模型的核心技术突破有3点:
第一,提出了新型的VLA模型架构:单一Transformer联合建模感知、推理与控制,自主实现快慢思考的模式切换。
第二,提出了空间视觉编码器3D ViT视觉模型。以视觉为核心,借助激光雷达的几何提示,引导模型去理解真实空间结构,通过端到端3D表征学习让AI拥有了和人一样的三维空间直觉。
第三,对强化学习进行了闭环,构建了低成本、高效率的仿真世界模型MindSim,模型在仿真环境中能够更快完成策略迭代。
无论是自研基座模型并将其部署到车端,还是带领团队预研下一代物理AI的核心框架,陈伟在理想汽车近5年的工作经历都能很好地复用进具身智能的创业里。
“从原来车端的小模型开始做具身的大模型,只有做智能驾驶的经验还不够,还需要有做过大模型经验的人。从车圈出来的人,大家都不缺量产能力,缺的是如何把技术模型拉高的能力。”上述研发人员称。
延续理想基因,聚焦家庭场景
无论是车企内部自研机器人,还是车圈高管投身具身智能创业,大多更倾向于B端工业场景——环境可控、任务单一、ROI可核算。和斜跃一样同为理想高管出来创业、同被元璟资本投资的至简动力,也将产品方向聚焦于工业场景,做面向B端的通用机器人。
相比之下,家庭场景被视为具身智能的“圣杯”,代表最开放的环境和最广泛的任务,解决了家庭任务,就代表模型可以实现完全泛化。有观点认为,当前的家庭具身智能市场很像10年前的新能源行业,虽然处于创新发展曲线的起始阶段,渗透率很低、产品也不完善,但也需要有公司躬身入局。
从公司成立之初,斜跃就确定了要做面向C端的家庭机器人。
“做To B的生意虽然场景更容易落地、融钱也更快,但离用户很远。”一位投资人告诉《21汽车·一见Auto》。
敢躬身入局家庭场景,和斜跃的创始团队背景有关。
进入家庭的机器人有很多关键难点。摆在面前的首要问题便是如何在零样本数据的情况下提高基座模型的泛化能力。而这恰恰是陈伟所擅长的。
陈伟除了擅长做基座模型的研发、设计外,在过往的履历中,也很擅长做多模态人机交互,加入理想前他曾担任搜狗AI交互事业部首席科学家、 AI交互技术部总经理。
能不能设计、训练一个泛化能力更强的基座模型,对于初创的具身智能公司很重要。但在基座模型之外,做好人机交互是基本功。“基座模型要做的是60-100分的事,而交互是要做0-60分的事。拉高上限很重要,但也需要先及格。”一位具身智能的从业者称。
相较于其他布局家庭场景的具身智能项目,斜跃创始团队均出身理想汽车,更懂中国家庭的真实需求与使用场景。
斜跃的另一位创始人——CEO张骁,在过往的履历中,无论是在宝马还是在理想,都擅长把控C端用户需求,去做产品定义和开发。作为理想汽车首任整车产品经理,张骁是爆款车型理想L9“冰箱彩电大沙发”产品策略的核心定义者。从理想汽车离职前,张骁担任第二产品线总裁。
(张骁,图源:理想汽车官方)
张骁、陈伟同为内蒙人、同为北京邮电大学的校友,同样在理想汽车工作多年并收获不少成绩,很多底层基因都很类似;一位是深耕AI领域、对基座模型的设计、研发都有着深刻认知的首席科学家,一位是具备敏锐的用户洞察、有着硬件落地的产品化能力和经验的负责人,二者在能力上又十分互补。
“未来的AI机器人一定是软硬一体的,这就需要创始团队既要懂产品、硬件,做好产品定义、找好场景,同时也要懂软件、技术,做好模型的泛化能力。”一位投资人点评。







